
Within the research group Cognition & Control in Human-Machine Systems at Max Planck Institute for Biological Cybernetics in Tübingen, we want to study fundamental principles of human perception, and translate them to a variety of applied fields, including the design of virtual environment. One of our research interests, and topic of today’s blog post, is the perception of self-motion.
In our recently published paper, entitled Accumulation of inertial sensory information in the perception of whole body yaw rotation, we focused on understanding how the human ability to discriminate among different motion intensities is affected by the time of exposure to the motion stimuli. In other words, can the accumulation of sensory evidence facilitate motion discrimination?
Using textbook psychophysical procedures, we measured that the smallest detectable change between two sinusoidal rotations around the vertical axis was ~3.5 deg/s for 1 sec long stimuli, and decreased to ~2.5 deg/s for 5 sec long stimuli. This suggests that humans can successfully accumulate sensory evidence over time, which allows them to be more accurate in discriminating self-movements of different intensities.
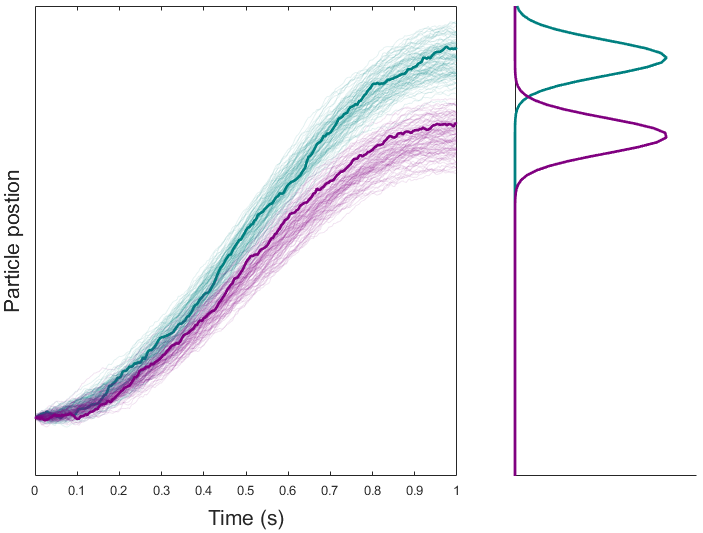
To further investigate the underlying decision processes, we compared our data with predictions of a model well-known in the study of sensory evidence accumulation: the Drift Diffusion Model (DDM). In general, the DDM relies on the basic assumption that information is accumulated continuously, and formalizes this process with a stochastic differential equation. Evidence accumulation is described by the position of a particle that drifts over time, while also being subjected to noise (see figure 1, bold lines). The drift rate determines the average speed at which information from the physical stimulus is accumulated. The noise reflects the probabilistic nature of perception, that is, the inter-trial variability that can lead to different responses to repetitions of the same stimulus. In figure 1, the bold lines represent a single experimental trial, where an observer had to indicate which of two movements was perceived as stronger (i.e., which stimulus had more acceleration, speed and overall displacement). In this case, the stimulus represented by the green trace would be reported by the model as stronger, since it drifted further. Over multiple presentations of the same two stimuli, the stronger stimulus would be reported as stronger more frequently than the weaker stimulus, although errors are expected to occur (cf. light traces in figure 1).
Research on self-motion perception is supported by a variety of applied fields, such as vehicle simulation, clinical treatment of balance disorders and motion sickness mitigation. There, experimental findings are used to continuously develop mathematical models that describe the internal processes underlying self-motion perception. The experiment here presented contributes to this process by suggesting the inclusion of a random noise term. This would allow predictions on both the average expected percept and its variability, thus accounting for experimentally observed perceptual phenomena such as inter-trial variability.
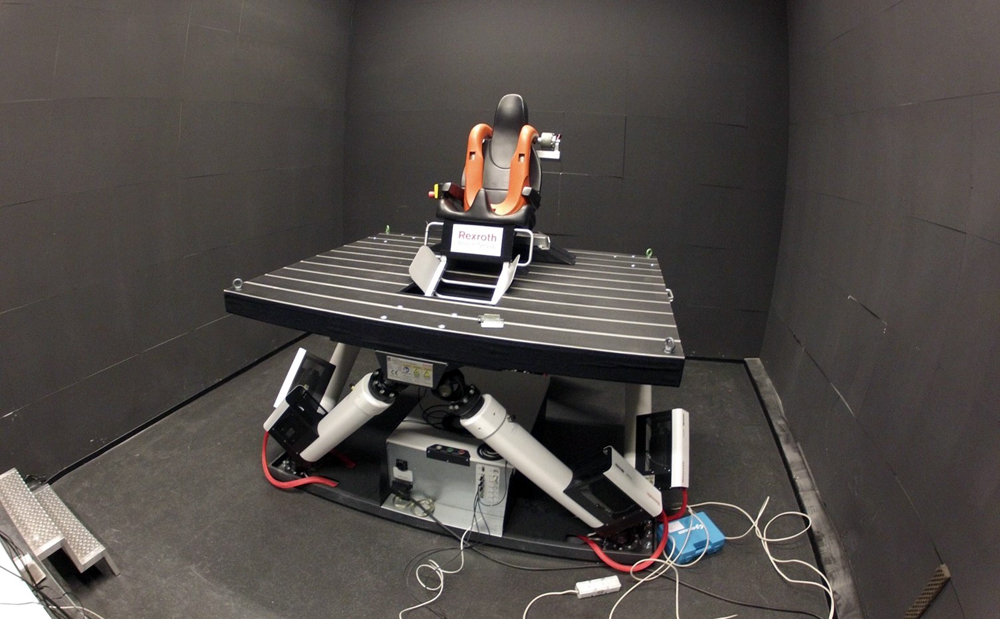
As a final note, it is worth mentioning that this experiment also served as first validation of the newly acquired MPI hexapod motion platform (figure 2), and of its in-house developed software interface. Future work will include fundamental and applied studies on self-motion perception and the combination of inertial cues and virtual environments (e.g., for driving simulation).
Reference: Nesti, A., De Winkel, K., & Bülthoff, H. H. (2017). Accumulation of Inertial Sensory Information in the Perception of Whole Body Yaw Rotation. PLoS ONE, 12(1).